Examples of CEDRAT APA® Applications
CEDRAT Piezoelectric Actuators
Muscle inspired actuators. Rehabilitation robots"
Bio-Robotics & Human-Modeling Laboratory, Georgia Institute of Technology
Contact: Jun Ueda, Assistant Professor
Dr. Ueda's research goal is to establish a theoretical design framework for highly integrated robotic systems.
 The application ranges from industrial robots, medical and rehabilitation robots, to intelligent assistive robots. Robustness against uncertainty of model and environment is crucial for these robots which work closely with humans or physically interact with humans and environments. The successful integration relies on the coordinated design of control, structure, actuators, and sensors by considering the dynamic interaction among them.
The application ranges from industrial robots, medical and rehabilitation robots, to intelligent assistive robots. Robustness against uncertainty of model and environment is crucial for these robots which work closely with humans or physically interact with humans and environments. The successful integration relies on the coordinated design of control, structure, actuators, and sensors by considering the dynamic interaction among them.
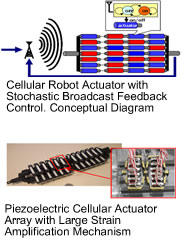
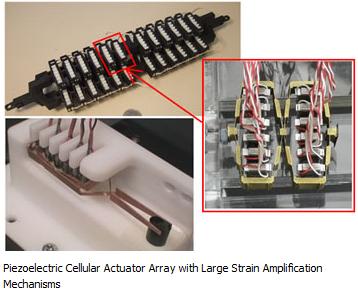
Actuators are a key component for new robotics. A cellular actuator concept inspired by biological muscle structure connects many small actuator units in series or in parallel, and composes in totality a single actuator. The method of stochastic broadcast control coordinates a vast number of units in this actuator system, which drastically improves wiring and addressing issues. Piezoelectric actuators using nested architecture with exponential strain amplification are developed for over twenty percent strain that is comparable to natural skeletal muscles.
Some of the development without this research are provided in the below movies.
NOTE: The piezo tweezers were developed by Prof. Ueda while in the Robotics Laboratory at Nara Institute of Science and Technology, Japan.
Cedrat Links
- Cedrat Catalog - 2025
- Mechanisms 2024
- Demo kit
- Evaluation Pack EP120S
- LSPA30uXS Dev Kit
- Piezoelectric Actuators
- CAu10-miniature linear amplifier
- LA75 / CA45 amplifiers
- Piezoelectric optical mechanisms
- SP75-switching amplifier
- UC45-controller
- UC75/UC75-MC real time controller
- XY piezoelectric stage
- SPA Movie (WMV)
